PyTorchで実装するPSPNet モジュール実装 FeatureMapモジュール偏 ⑥
記事一覧
- はじめに ①
- 理論編 ②
- データセット準備偏 ③
- DataLoader実装偏 ④
- モジュール実装 解説編 ⑤
- モジュール実装 FeatureMapモジュール偏 ⑥ (← 今ココ)
- モジュール実装 Pyramid Pooling モジュール偏 ⑦
- モジュール実装 UpSamplingモジュール偏 ⑧
- モジュール実装 AuxLossモジュール偏 ⑨
- ファインチューニング 準備偏 ⑩
- ファインチューニング 実践偏 ⑪
PSPNetを実装するにあたり、この記事ではFeatureMapモジュールを実装します。
実装については、次の実装を参考にしています。
ディレクトリ構成は以下のような構成になっています。
initmodelの中には学習済みのResNetのパラメータを保存します。
modelの中にResNetとPSPNetを実装していきます。
├─ data
| └─ VOCdevkit
| └─ VOC2012
| ├─ Annotations
| ├─ ImageSets
| ├─ JPEGImages
| ├─ SegmentationClass
| └─ SegmentationObject
├─ initmodel
| └─ resnet50_v2.pth # 学習済みモデルはここに保存する
├─ model
| ├─ pspnet.py # PSPNetはここに記述していく
| └─ resnet.py # ResNetはここに記述していく
└─ util
└─ dataloader.py
次に今回使用するライブラリです。
import torch import torch.nn as nn from torchvision import models
最後に全体のコードも載せているので、実際に動かしながら確認していただければと思います。
1. FeatureMapモジュールの役割
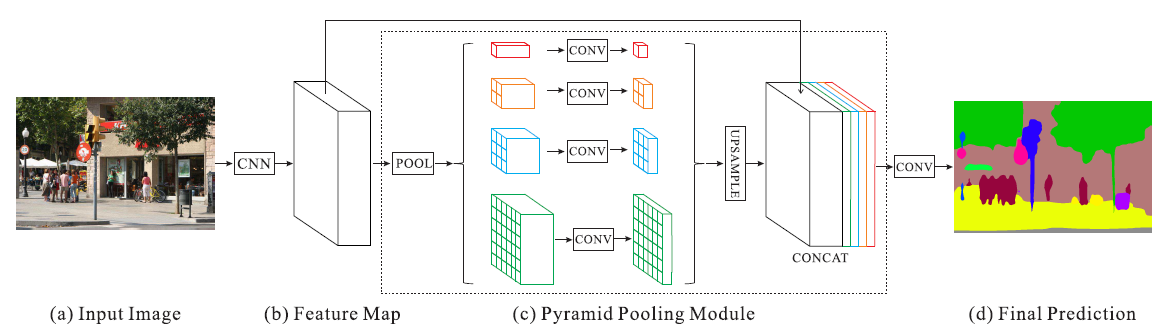
このモジュールは、入力画像から最初にCNNによる畳込みを行い特徴量を抽出します。
この畳み込みで使用するモデルは、学習済みのResNetを使用しています。
Feature Map モジュールではサイズが (3 × 475 ×475) の入力画像を、(2048 × 60 × 60) に変換します。
2. ResNetの実装
PSPNetで使用している学習済みモデルはResNetを使用しています。
まずはじめに、PSPNet内で使用するResNetを実装していきます。
いくつか実装上の注意点を説明した後に、実装に移っていきたいと思います。
2.1. 使用する学習済みモデルについて
PyTorchのtorchvison.models.resent50で実装されているResNetと、PSPNet内で使用されているResNetはネットワーク構成に少し差異があります。
PyTorchのtorchvison.models.resent50で実装されているResNetは最初の畳み込みが7×7になっています。
それに対して、PSPNet内で使用されているResNetは最初の畳み込みが3×3になっています。
これは分類精度が3×3にしたほうが優れているらしく、こちらを採用しているらしいです。
実際にそれぞれのResNetの構成を一部抜粋して、違いを確認してみます。
まずは、PyTorchのtorchvison.models.resent50で実装されているResNetのネットワーク構成です。
ResNet( (conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False) (bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (relu): ReLU(inplace=True) (maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False) ・・・・・ ・・・・・ )
次に、PSPNet内で使用されているResNetのネットワーク構成です。
ResNet( (conv1): Conv2d(3, 64, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False) (bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (conv3): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False) (bn3): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True) (relu): ReLU(inplace=True) (maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False) ・・・・・ ・・・・・ )
実際にネットワーク構成に差異があるのがわかると思います。
今回はPSPNetで使用しているResNetを実装していきたいと思います。
2.2. 学習済みモデルのダウンロード
学習済みResNetのパラメータは別途ダウンロードする必要があります。
ダウンロード先は以下のURLです。resnet50_v2.pthをダウンロードしてください。
https://drive.google.com/drive/folders/1Hrz1wOxOZm4nIIS7UMJeL79AQrdvpj6v
ダウンロードしたら、initmodelの下に格納してください。
├─ data
| └─ VOCdevkit
| └─ VOC2012
| ├─ Annotations
| ├─ ImageSets
| ├─ JPEGImages
| ├─ SegmentationClass
| └─ SegmentationObject
├─ initmodel
| └─ resnet50_v2.pth # ← ダウンロードしたパラメータファイルをここに格納する
├─ model
| ├─ pspnet.py
| └─ resnet.py
└─ util
└─ dataloader.py
2.3. 実装
ゼロからResNetを実装していくのは非常に大変なので、基本的にはtorchvison.models.resent50で実装されているResNetを使いまわしつつ、差異部分は新規作成または変更しています。
nn.Moduleを継承させたResNetクラスを作成していきます。
実装としては次のようになります。新規作成箇所、使いまわし箇所、変更箇所をコメントで記載しています。
import torch import torch.nn as nn from torchvision import models class ResNet(nn.Module): def __init__(self): super(ResNet, self).__init__() # 新規作成 # PSPNetで使用するResNetの最初の畳み込み層の定義を行う self.conv1 = nn.Conv2d(in_channels=3, out_channels=64, stride=2, kernel_size=3, padding=1, bias=False) self.bn1 = nn.BatchNorm2d(64) self.conv2 = nn.Conv2d(in_channels=64, out_channels=64, stride=1, kernel_size=3, padding=1, bias=False) self.bn2 = nn.BatchNorm2d(64) self.conv3 = nn.Conv2d(in_channels=64, out_channels=128, stride=1, kernel_size=3, padding=1, bias=False) self.bn3 = nn.BatchNorm2d(128) self.relu = nn.ReLU(inplace=True) self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) # 使いまわし # PyTorchで実装済みのResNetを読み込み、必要なところだけを使用する model = models.resnet50(weights=models.ResNet50_Weights.IMAGENET1K_V1) self.layer1 = model.layer1 self.layer2 = model.layer2 self.layer3 = model.layer3 self.layer4 = model.layer4 self.avgpool = model.avgpool self.fc = model.fc # 変更 # Layer1をPSPNetで使用するResNetの実装に合わせるため、一部、Conv2dのパラメータを変更する self.layer1[0].conv1 = nn.Conv2d(in_channels=128, out_channels=64, stride=1, bias=False, kernel_size=1) self.layer1[0].downsample[0] = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=1, stride=1, bias=False) def forward(self, x): x = self.relu(self.bn1(self.conv1(x))) x = self.relu(self.bn2(self.conv2(x))) x = self.relu(self.bn3(self.conv3(x))) x = self.maxpool(x) x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) x = self.layer4(x) x = self.avgpool(x) x = x.view(x.size(0), -1) x = self.fc(x) return x
モデルのパラメータファイルを読み込むことができれば、問題なくResNetが実装できています。
うまく読み込むことができれば、<All keys matched successfully>が出力されます。
モデルとパラメータファイルに差異があると、例外が発生します。
# ダウンロードしたモデルのパラメータファイル model_path = '../initmodel/resnet50_v2.pth' resnet = ResNet() resnet.load_state_dict(torch.load(model_path), strict=False)
# Output <All keys matched successfully>
最後に、PSPNetからResNetを呼び出すときに、モデル読み込みまでを行う関数を作成しておきます。
def resnet50(pretrained=False): model = ResNet() if pretrained is True: model_path = '../initmodel/resnet50_v2.pth' model.load_state_dict(torch.load(model_path), strict=False) return model
これでResNetの実装が完了です。
3. PSPNetの実装
実装したResNetを使用して、PSPNetのFeature Map モジュールを実装していきます。
ここではFeature Map モジュールの実装のみですので、PSPNetの実装はまだ先に続きますのでご注意ください。
3.1. 実装上の注意点:畳み込みフィルタのパラメータ変更
まず最初に、畳み込みフィルタにおけるdilationというものを説明します。
dilationとは、畳み込みフィルタのセル間隔を設定するものになります。
kernel_size=3のフィルタの場合、dilationが1と2の場合の動きの違いを図に示します。
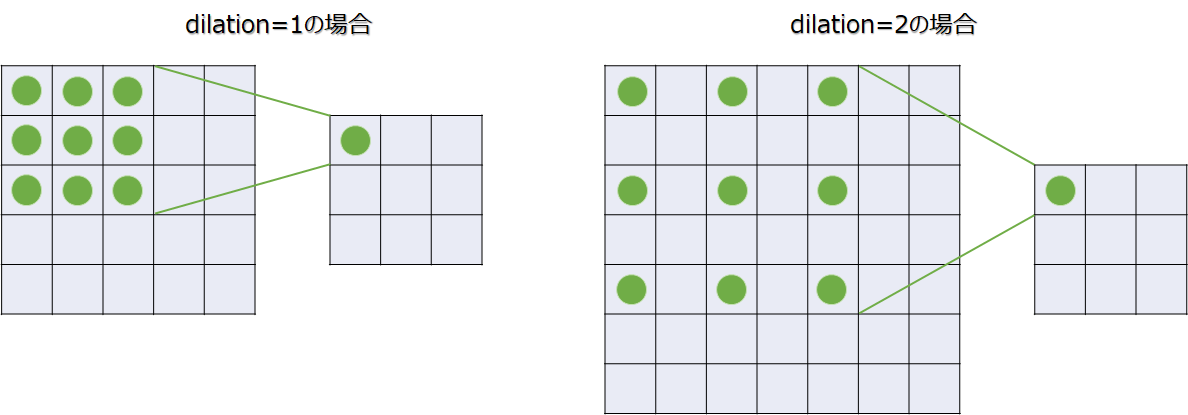
図から見てわかるように、dilationの効果として、より広範囲のセルの影響を考慮することができます。
通常の畳み込みフィルタではdilationが1になっています。PSPNetでは大局的な特徴を抽出するために、dilationの値を特別に設定します。
そのため、ResNetのlayer3とlayer4の一部の層のパラメータを変更する処理を行っています。
3.2. 実装上の注意点:途中の出力を抜き出す
forward処理のところで、layer3からの出力を別途抜き出しています。
これは後で解説するAuxLossモジュールのためです。
def forward(self, x): x = self.layer0(x) x = self.layer1(x) x = self.layer2(x) # AuxLossのためにlayer3から出力を抜き出しておく x_tmp = self.layer3(x) x = self.layer4(x_tmp) return x
3.3. 実装
nn.Moduleを継承させたPSPNetクラスを作成していきます。
上で説明した注意点をもとに実装します。
PSPNetではResNetを全部使用するわけではなく、最初の畳み込みフィルタとlayer1からlayer4までを使用します。
import sys sys.path.append('../') import torch import torch.nn as nn from model.resnet import resnet50 class PSPNet(nn.Module): def __init__(self): super(PSPNet, self).__init__() # ResNetから最初の畳み込みフィルタとlayer1からlayer4を取得する resnet = resnet50(pretrained=True) self.layer0 = nn.Sequential( resnet.conv1, resnet.bn1, resnet.relu, resnet.conv2, resnet.bn2, resnet.relu, resnet.conv3, resnet.bn3, resnet.relu, resnet.maxpool ) self.layer1, self.layer2, self.layer3, self.layer4 = resnet.layer1, resnet.layer2, resnet.layer3, resnet.layer4 # layer3とlayer4の畳み込みフィルタのパラメータを変更する for n, m in self.layer3.named_modules(): if 'conv2' in n: m.dilation, m.padding, m.stride = (2, 2), (2, 2), (1, 1) elif 'downsample.0' in n: m.stride = (1, 1) for n, m in self.layer4.named_modules(): if 'conv2' in n: m.dilation, m.padding, m.stride = (4, 4), (4, 4), (1, 1) elif 'downsample.0' in n: m.stride = (1, 1) def forward(self, x): x = self.layer0(x) x = self.layer1(x) x = self.layer2(x) # AuxLossのためにlayer3から出力を抜き出しておく x_tmp = self.layer3(x) x = self.layer4(x_tmp) return x
動作確認として、実際にモデルを動かしみます。
# ダミーデータの作成 input = torch.rand(4, 3, 475, 475) model = PSPNet() model.eval() output = model(input) print(output.shape)
# Output torch.Size([4, 2048, 60, 60])
想定通り、torch.size([バッチサイズ, 2048, 60, 60])の形で出力されています。
これでFeature Map モジュールの実装が完了です。
4. まとめ
今回の記事ではResNetの実装と、PSPNet内のFeature Map モジュールを実装しました。
これだけではPSPNetは完成でないなので、さらに実装を続けていきます。
最後に全体のコードを載せておきます。
5. 参考
論文
-
この論文の内容を紹介しています
-
-
https://github.com/hszhao/semseg
実装方法については、こちらのGithubのコードを参考にしています。
書籍
つくりながら学ぶ!PyTorchによる発展ディープラーニング
PyTorchの実装やファインチューニングの方法など、こちらの書籍を参考にしています。
6. 全体コード
# model.resnet.py ### ライブラリ import torch import torch.nn as nn from torchvision import models ### クラス定義 class ResNet(nn.Module): def __init__(self): super(ResNet, self).__init__() # 新規作成 # PSPNetで使用するResNetの最初の畳み込み層の定義を行う self.conv1 = nn.Conv2d(in_channels=3, out_channels=64, stride=2, kernel_size=3, padding=1, bias=False) self.bn1 = nn.BatchNorm2d(64) self.conv2 = nn.Conv2d(in_channels=64, out_channels=64, stride=1, kernel_size=3, padding=1, bias=False) self.bn2 = nn.BatchNorm2d(64) self.conv3 = nn.Conv2d(in_channels=64, out_channels=128, stride=1, kernel_size=3, padding=1, bias=False) self.bn3 = nn.BatchNorm2d(128) self.relu = nn.ReLU(inplace=True) self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) # 使いまわし # PyTorchで実装済みのResNetを読み込み、必要なところだけを使用する model = models.resnet50(weights=models.ResNet50_Weights.IMAGENET1K_V1) self.layer1 = model.layer1 self.layer2 = model.layer2 self.layer3 = model.layer3 self.layer4 = model.layer4 self.avgpool = model.avgpool self.fc = model.fc # 変更 # Layer1をPSPNetで使用するResNetの実装に合わせるため、一部、Conv2dのパラメータを変更する self.layer1[0].conv1 = nn.Conv2d(in_channels=128, out_channels=64, stride=1, bias=False, kernel_size=1) self.layer1[0].downsample[0] = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=1, stride=1, bias=False) def forward(self, x): x = self.relu(self.bn1(self.conv1(x))) x = self.relu(self.bn2(self.conv2(x))) x = self.relu(self.bn3(self.conv3(x))) x = self.maxpool(x) x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) x = self.layer4(x) x = self.avgpool(x) x = x.view(x.size(0), -1) x = self.fc(x) return x ### 関数定義 def resnet50(pretrained=False): model = ResNet() if pretrained is True: model_path = '../initmodel/resnet50_v2.pth' model.load_state_dict(torch.load(model_path), strict=False) return model # 動作確認 if __name__ == '__main__': input = torch.rand(4, 3, 475, 475) model = resnet50(pretrained=True) model.eval() output = model(input) print(output.shape)
# model.pspnet.py ### ライブラリ import sys sys.path.append('../') import torch import torch.nn as nn from model.resnet import resnet50 ### クラス定義 class PSPNet(nn.Module): def __init__(self): super(PSPNet, self).__init__() # ResNetから最初の畳み込みフィルタとlayer1からlayer4を取得する resnet = resnet50(pretrained=True) self.layer0 = nn.Sequential( resnet.conv1, resnet.bn1, resnet.relu, resnet.conv2, resnet.bn2, resnet.relu, resnet.conv3, resnet.bn3, resnet.relu, resnet.maxpool ) self.layer1, self.layer2, self.layer3, self.layer4 = resnet.layer1, resnet.layer2, resnet.layer3, resnet.layer4 # layer3とlayer4の畳み込みフィルタのパラメータを変更する for n, m in self.layer3.named_modules(): if 'conv2' in n: m.dilation, m.padding, m.stride = (2, 2), (2, 2), (1, 1) elif 'downsample.0' in n: m.stride = (1, 1) for n, m in self.layer4.named_modules(): if 'conv2' in n: m.dilation, m.padding, m.stride = (4, 4), (4, 4), (1, 1) elif 'downsample.0' in n: m.stride = (1, 1) def forward(self, x): x = self.layer0(x) x = self.layer1(x) x = self.layer2(x) # AuxLossのためにlayer3から出力を抜き出しておく x_tmp = self.layer3(x) x = self.layer4(x_tmp) return x # 動作確認 if __name__ == '__main__': input = torch.rand(4, 3, 475, 475) model = PSPNet() model.eval() output = model(input) print(output.shape)